RObot components
|
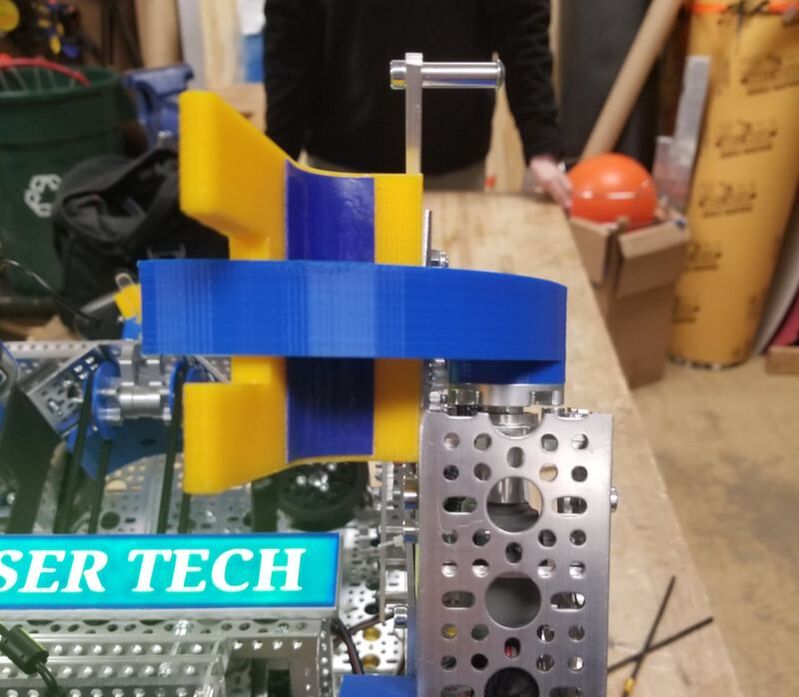
The Claw:
The claw was designed to pick up the wobble goal and lift it over the fence. We had to specially design it to fit in the 18in limit. It consists of a motor and a servo. It also has a button that tells the programmers what position it is at. This part of the robot is very important because it lets us score 15 points for lifting the wobble goal over the wall. The claw also has an aluminum bar to help us right the wobble goal when it is knocked over. |
|
|
The Intake:
The intake is an important part of our robot, as it is how our robot will pick up the rings. This is one of the main components of our robot. We used a wheel system to pick up the rings. It first compresses the rings which then raises it onto the plexi-glass surface and into the launcher area. We decided to use the wheel system for our intake because it best accommodated the launcher, and was accurate 100% of the time in picking up the rings. We also have a pair of rubber bands to assist the ring on its journey up our robot. |
|
|
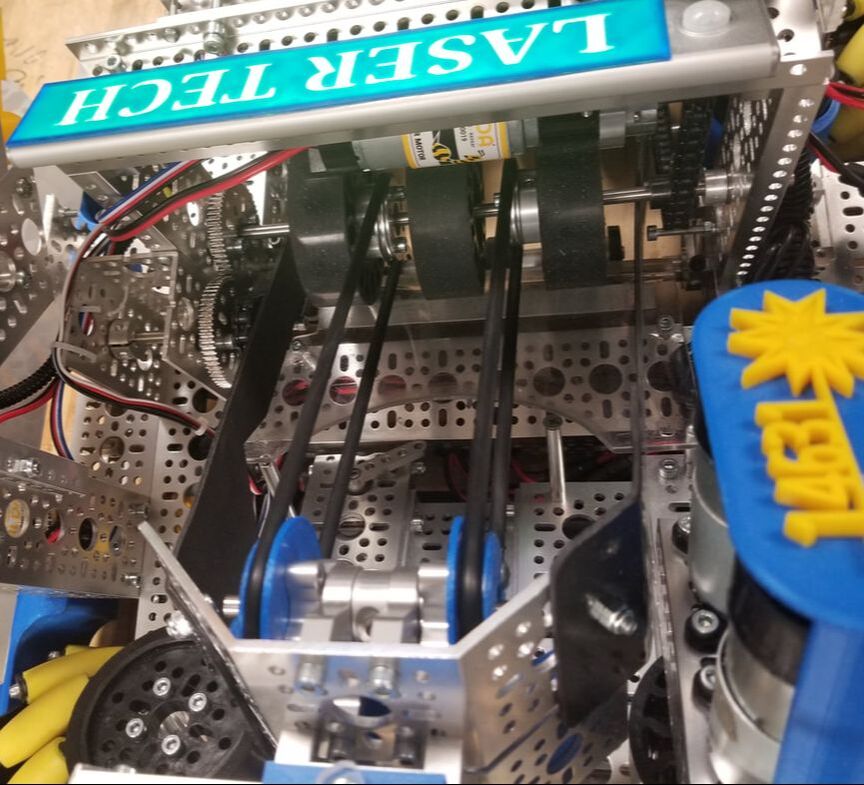
The Launcher:
We tested many different prototypes, with different amounts of pressure, wheels, and speed. We found that the ideal speed was one flywheel for the launcher. The launcher launches the rings straight and at an upward angle. Before the rings are launched, a servo moves the rings up and the expanded flywheel catches them and launches them. We used this design because it is the most accurate, and fast way to launch. It also collects three rings at a time to go faster. From far away, the rings are less accurate because of the precise speed and angle. However, we decided to shoot from closer, because this game strategy was beneficial to the accuracy and time for other points. 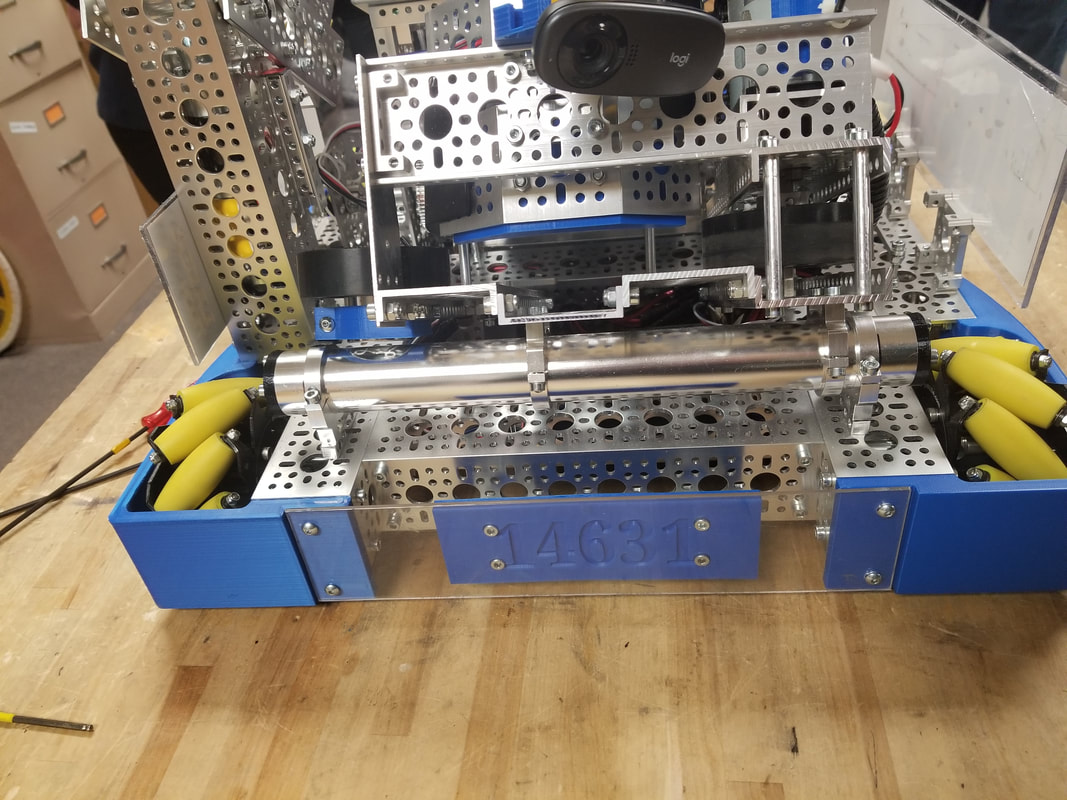
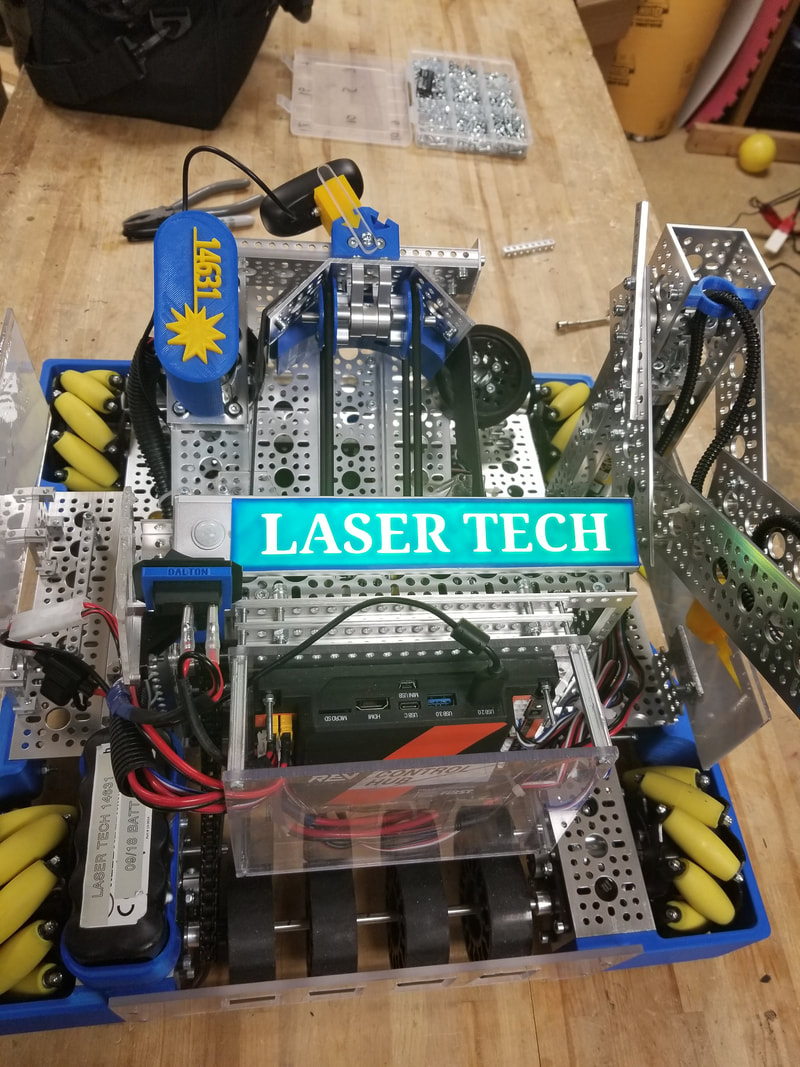
The Camera:
Our camera uses Vuforia to scan a small section of our field. We have a small mount for our camera that is also interchangeable so we can set it up no matter what side of the field we are on. This allows our camera to be in a prime scanning position at the beginning of the match. When initializing our camera begins to scan a small vertical slice of the rings while determining how many orange pixels are in that slice using our own processing program. This will then allow us to get the wobble goal in the correct position. |

|
Game STRATEGY AND auto
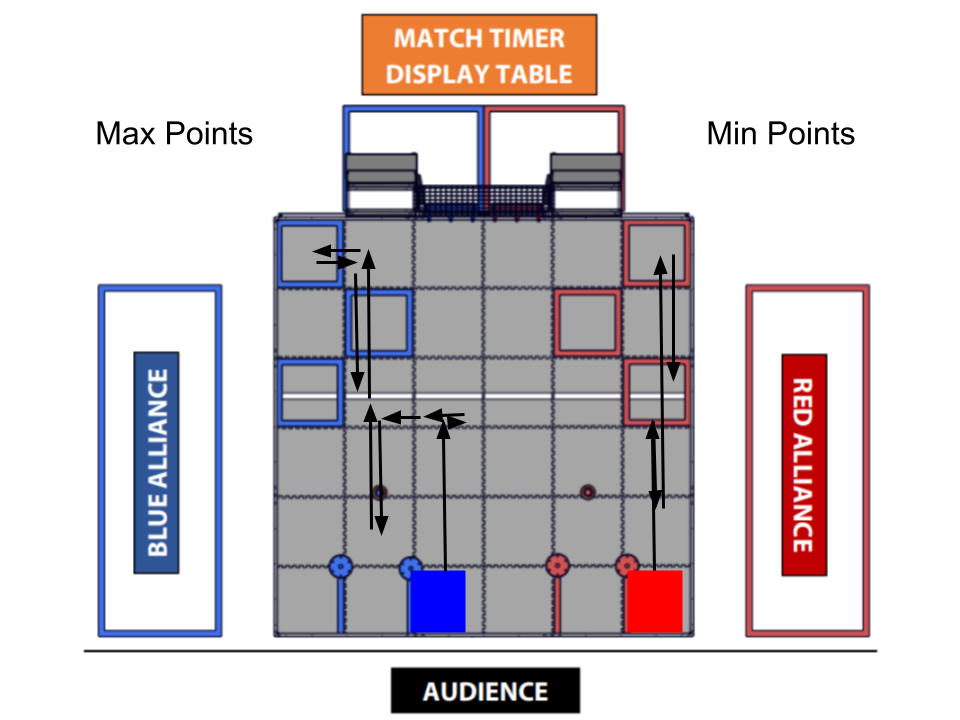
Our autonomous map above shows our main 2 autonomous. These are our base autonomous and we can use it to work with many teams and their autonomous. We have lots of specialized autonomous for working with specific teams but those are still in the works of getting perfected. We currently have about 6 autonomous for each side so we can work with a variety of teams and some that are special made for specific teams. During Tele-Op, we shoot about 20-30 rings into the high goal and in end game we can shoot power shots or move wobble goals. If we want to, we can also do both of these actions in the 30 seconds and keep our teammate scoring high goals. We have a program where if our drivers get into a specific position, we are able to click a button that will shoot all of our power-shots. This program is yet to be perfected but we believe we will have it ready before the state championship. We can also shoot from left of our goal or right of our goal if our team mate were to be blocking the optimal shooting position. For each program we place our wobble goal at different times. In our inside auto we place it at 28 seconds for 4 rings, 15 seconds for 1 ring, and 10 seconds for 0 rings. We then will park toward the middle of the field on the line. We will also try to stay out of the outside lane as much as possible so our teammate can have their own area. For our outside lane, we stay in the outside lane so our teammate doesn't hit us and we place our wobble goal last second so we don't risk hitting them. If you would like to meet up and talk about our autonomous, you can contact us at our email or join our discord server.
